|
|
|
|
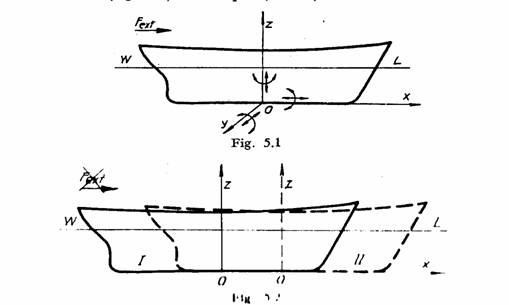

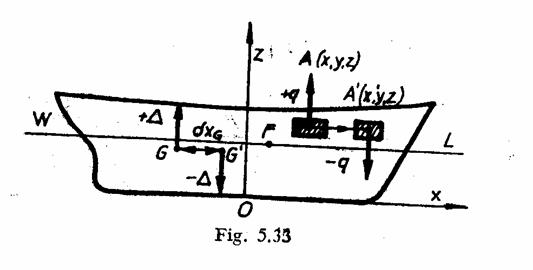
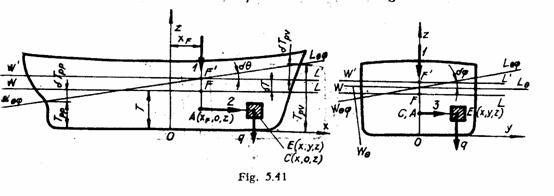
Pentru demonstratie se
considera nava reprezentata prin sectiunea transversala ce
include centrul F al plutirii initiale drepte WL, precum si o
portiune din suprafata acestei plutiri. De mentionat ca ![]() . Fie
. Fie ![]() , marimea momentului exterior, care produce inclinarea
definita de unghiul infinit mic
, marimea momentului exterior, care produce inclinarea
definita de unghiul infinit mic ![]() . Acestei inclinari ii corespunde plutirea
. Acestei inclinari ii corespunde plutirea ![]() .
.
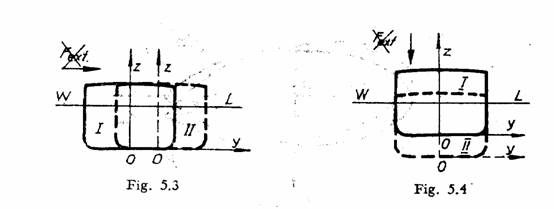
Se presupune, prin reducere la
absurd, ca plutirile nu se intersecteaza dupa dreapta ce trece
prin F, ci dupa o axa ![]() ce trece prin punctul
ce trece prin punctul ![]() . Volumul
. Volumul ![]() , care intra in apa in urma inclinarii, se
numeste volumul ongletului imers. Volumul
, care intra in apa in urma inclinarii, se
numeste volumul ongletului imers. Volumul ![]() , care iese din apa in urma inclinarii navei, se
numeste volumul ongletului emers.
, care iese din apa in urma inclinarii navei, se
numeste volumul ongletului emers.
![]() .
.
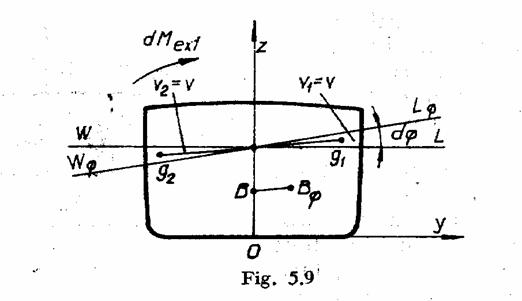
Se noteaza cu ![]() ariile
partii suprafetei plutirii din dreapta, respectiv din stanga
axei
ariile
partii suprafetei plutirii din dreapta, respectiv din stanga
axei ![]() . Pentru calculele volumelor
. Pentru calculele volumelor ![]() se considera
cilindrii elementari situati la distantele
se considera
cilindrii elementari situati la distantele ![]() fata de
fata de ![]() , la aceeasi distanta a fata de Ox
si avand bazele de arie
, la aceeasi distanta a fata de Ox
si avand bazele de arie ![]() .
.
![]()
Egalitatea este
adevarata daca: ![]() .
.
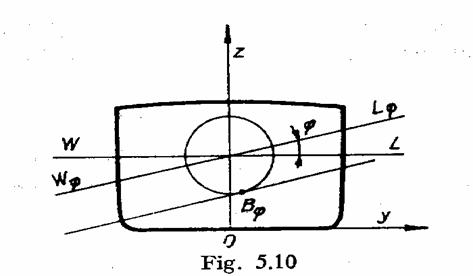
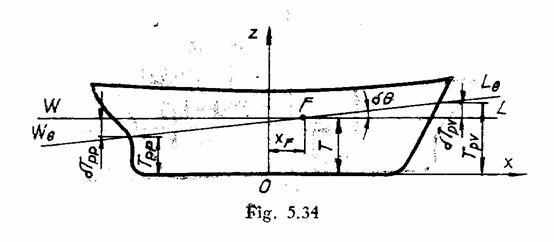
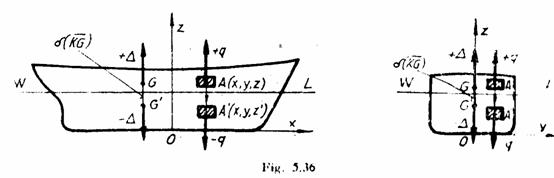
Fie acum nava reprezentata
in ¤, avand pozitia initiala dreapta WL si centrul de
carena B. Sub actiunea momentului exterior, de marime ![]() , ea se inclina in plan transversal cu unghiul
, ea se inclina in plan transversal cu unghiul ![]() . In urma inclinarii plutirea navei devine
. In urma inclinarii plutirea navei devine ![]() , iar centrul de carena se deplaseaza in
, iar centrul de carena se deplaseaza in ![]() . Volumele celor doua onglete sunt egale, deci
. Volumele celor doua onglete sunt egale, deci ![]() . Deplasarea centrului de carena este cauzata de
deplasarea volumului v din centrul
geometric
. Deplasarea centrului de carena este cauzata de
deplasarea volumului v din centrul
geometric ![]() al ongletului emers in
centrul geometric
al ongletului emers in
centrul geometric ![]() al ongletului imers.
al ongletului imers.
Teorema: La
inclinarile infinit mici ale navei, centrul de carena se
deplaseaza dupa o directie paralela cu dreapta ce trece
prin centrele geometrice ![]() ale celor doua
onglete si are marimea proportionala cu
ale celor doua
onglete si are marimea proportionala cu ![]() , respectiv cu volumul v
ce se deplaseaza din ongletul emers in ongletul imers si invers
proportionala cu volumul carenei V.
, respectiv cu volumul v
ce se deplaseaza din ongletul emers in ongletul imers si invers
proportionala cu volumul carenei V.
![]()
Proprietate: Tangenta dusa
intr-un punct ![]() la curba centrelor de
carena este paralela cu plutirea care admite pe
la curba centrelor de
carena este paralela cu plutirea care admite pe ![]() drept centru de
carena.
drept centru de
carena.
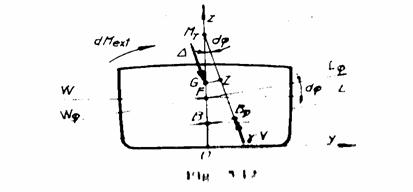
Se considera nava
reprezentata prin sectiunea sa in ¤, avand pozitia
initiala dreapta WL, careia ii corespunde centrul de
carena B. Fie ![]() , marimea momentului exterior care
, marimea momentului exterior care
produce inclinarea definita
de unghiul infinit mic ![]() . Acestei inclinari ii corespunde plutirea
. Acestei inclinari ii corespunde plutirea ![]() . Centrul de carena se deplaseaza din B in
. Centrul de carena se deplaseaza din B in ![]() descriind curba
centrelor de carena. Se duc tangentele la curba centrelor de carena
in B si
descriind curba
centrelor de carena. Se duc tangentele la curba centrelor de carena
in B si ![]() . Normalele la aceste tangente in B si
. Normalele la aceste tangente in B si ![]() se intersecteaza
in punctul
se intersecteaza
in punctul ![]() denumit metacentru
transversal.
denumit metacentru
transversal.
Metacentrul transversal ![]() este centrul de
curbura al curbei centrelor de carena pentru inclinarile
transversale.
este centrul de
curbura al curbei centrelor de carena pentru inclinarile
transversale.
Pozitia metacentrului
transversal este definita de cota ![]() .
.
Cota ![]() a metacentrului
transversal este distanta de la
a metacentrului
transversal este distanta de la ![]() la PB.
la PB.
Inclinarea navei fiind
mica, arcul ![]() se aproximeaza cu coarda, care se considera
confundata cu tangenta la curba centrelor de carena in
se aproximeaza cu coarda, care se considera
confundata cu tangenta la curba centrelor de carena in ![]() .
.
Raza metacentrica
transversala ![]() este distanta de
la centrul de carena la metacentrul transversal sau altfel spus este raza
de curbura a curbei centrelor de carena corespunzatoare unei
inclinari transversale infinit mici.
este distanta de
la centrul de carena la metacentrul transversal sau altfel spus este raza
de curbura a curbei centrelor de carena corespunzatoare unei
inclinari transversale infinit mici.
![]() se calculeaza din
triunghiul
se calculeaza din
triunghiul ![]() , care este dreptunghic:
, care este dreptunghic:
![]() .
.
Prin deplasarea centrului de
carena din B in ![]() , se modifica directiile de actiune ale
fortei de impingere Arhimede si de deplasament, luand nastere
cuplul care defineste momentul stabilitatii transversale. Pentru
inclinarea infinit mica:
, se modifica directiile de actiune ale
fortei de impingere Arhimede si de deplasament, luand nastere
cuplul care defineste momentul stabilitatii transversale. Pentru
inclinarea infinit mica:
![]() ,
,
unde ![]() este bratul
cuplului si se calculeaza din triunghiul dreptunghic
este bratul
cuplului si se calculeaza din triunghiul dreptunghic ![]() :
:
![]() .
.
Inaltimea
metacentrica transversala ![]() este distanta de la
metacentrul transversal, corespunzator inclinarilor nule, la centrul
de greutate.
este distanta de la
metacentrul transversal, corespunzator inclinarilor nule, la centrul
de greutate.
![]() ,
,
in care: ![]() este distanta de la centrul de carena la centrul de
greutate pentru inclinarea nula.
este distanta de la centrul de carena la centrul de
greutate pentru inclinarea nula.
![]() .
.
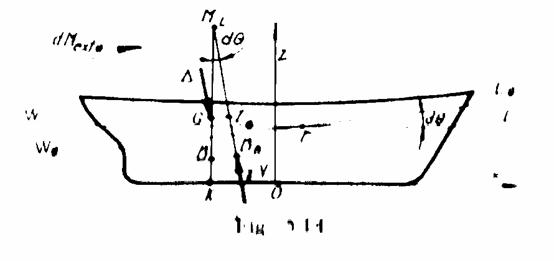
Se considera nava
reprezentata prin sectiunea sa in PD, avand pozitia
initiala dreapta WL, careia ii corespunde centrul de
carena B. Fie ![]() , marimea momentului exterior care produce inclinarea
definita de unghiul
, marimea momentului exterior care produce inclinarea
definita de unghiul ![]() . Acestei inclinari in corespunde plutirea
. Acestei inclinari in corespunde plutirea ![]() . Centrul de carena se deplaseaza din B in
. Centrul de carena se deplaseaza din B in ![]() , descriind curba centrelor de carena in plan
longitudinal.
, descriind curba centrelor de carena in plan
longitudinal.
Metacentrul longitudinal ![]() este centrul de
curbura al curbei centrelor de carena pentru inclinarile
longitudinale si are pozitia definita prin cota
este centrul de
curbura al curbei centrelor de carena pentru inclinarile
longitudinale si are pozitia definita prin cota ![]() .
.
Raza metacentrica
longitudinala ![]() este distanta de
la centrul de carena la metacentrul longitudinal sau, altfel spus, este
raza de curbura a curbei centrelor de carena, corespunzatoare
unei inclinari longitudinale infinit mici.
este distanta de
la centrul de carena la metacentrul longitudinal sau, altfel spus, este
raza de curbura a curbei centrelor de carena, corespunzatoare
unei inclinari longitudinale infinit mici.
![]()
![]() ,
,
unde ![]() este
inaltimea metacentrica longitudinala.
este
inaltimea metacentrica longitudinala.
Inaltimea
metacentrica longitudinala ![]() este distanta de
la metacentrul longitudinal, corespunzator inclinarii nule, la
centrul de greutate.
este distanta de
la metacentrul longitudinal, corespunzator inclinarii nule, la
centrul de greutate.
![]() .
.
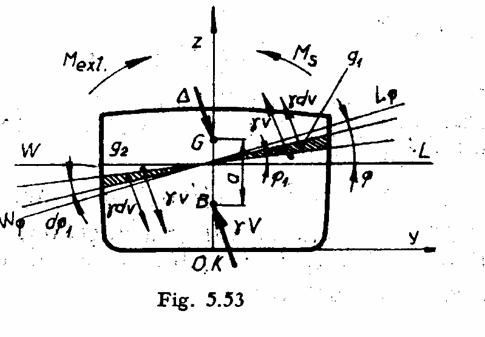
Se considera nava
reprezentata prin sectiunea sa in ¤, avand plutirea
initiala dreapta WL si centrul de carena B. Fie ![]() , marimea momentului exterior care inclina nava in
plan transversal cu unghiul infinit mic
, marimea momentului exterior care inclina nava in
plan transversal cu unghiul infinit mic ![]() . Plutirea definita de acest unghi este
. Plutirea definita de acest unghi este ![]() . Fenomenul aparitiei momentului stabilitatii
transversale se descompune ipotetic in doua etape.
. Fenomenul aparitiei momentului stabilitatii
transversale se descompune ipotetic in doua etape.
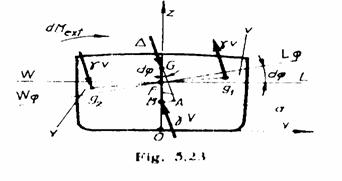
In prima etapa se presupune
ca, in urma inclinarii navei, volumul carenei nu-si
modifica forma, deci centrul de carena ramane in B. Cele
doua forte, una de deplasament, aplicata in G si
cealalta de impingere Arhimede, aplicata in B, actioneaza
perpendicular pe ![]() dand nastere
cuplului care defineste momentul stabilitatii de greutate:
dand nastere
cuplului care defineste momentul stabilitatii de greutate:
![]() .
.
In a doua etapa se
considera ca pe nava deja inclinata se produce deplasarea
volumului de apa v, din centrul ![]() al ongletului emers in
centrul
al ongletului emers in
centrul ![]() al ongletului imers.
Aceasta deplasare determina aparitia a doua forte de
marime
al ongletului imers.
Aceasta deplasare determina aparitia a doua forte de
marime ![]() , aplicate in
, aplicate in ![]() , perpendiculare pe
, perpendiculare pe ![]() si de semne
contrare. Cuplul celor doua forte defineste momentul
stabilitatii de forma:
si de semne
contrare. Cuplul celor doua forte defineste momentul
stabilitatii de forma:
![]() .
.
![]()
![]()
![]()
![]()
![]() .
.
Pentru unghiuri mici finite ![]() , avem:
, avem:

In unele situatii, cand ![]() , momentele stabilitatii se pot calcula cu
urmatoarele formule fara a se aproxima sinusul cu valoarea
unghiului exprimata in radiani si astfel avem:
, momentele stabilitatii se pot calcula cu
urmatoarele formule fara a se aproxima sinusul cu valoarea
unghiului exprimata in radiani si astfel avem:

Momentul unitar de banda
este momentul exterior care inclina nava in plan transversal cu un unghi ![]() .
.
Pentru stabilirea formulei de
calcul a momentului unitar de banda se pune conditia de echilibru,
corespunzatoare pozitiei inclinate definite de unghiul ![]() :
:
![]() .
.
Daca in aceasta
formula se face ![]() se obtine:
se obtine:
![]() .
.
Momentul unitar de asieta
este momentul exterior, care inclina nava in plan longitudinal
producandu-i o asieta ![]() .
.
Asieta navei ![]() este diferenta
dintre pescajele prova si pupa.
este diferenta
dintre pescajele prova si pupa.
Pentru stabilirea formulei de
calcul a momentului unitar de asieta se pune conditia de echilibru,
corespunzatoare pozitiei inclinate definite de unghiul ![]() :
:
![]() .
.
![]() .
.
![]()
Scara de incarcare este un
tabel in care sunt trecute valorile deplasamentului Δ, deplasamentului ![]() , deplasamentului unitar
, deplasamentului unitar ![]() , momentului unitar de banda
, momentului unitar de banda ![]() si momentului
unitar de asieta
si momentului
unitar de asieta ![]() pentru diferite
pescaje cuprinse intre LB si CWL.
pentru diferite
pescaje cuprinse intre LB si CWL.
Daca ![]() si diferenta
dintre cele doua greutati specifice este infinit mica,
adica
si diferenta
dintre cele doua greutati specifice este infinit mica,
adica ![]() , atunci avem:
, atunci avem:
![]() .
.
Variatia ![]() a volumului carenei
corespunzatoare lui
a volumului carenei
corespunzatoare lui ![]() este:
este:
![]() .
.
![]() .
.
Deoarece ![]() si relatia
de mai sus devine:
si relatia
de mai sus devine:
![]() .
.
![]()
Daca ![]() , deci nava trece intr-o apa cu greutate specifica
mai mare, atunci:
, deci nava trece intr-o apa cu greutate specifica
mai mare, atunci:
pentru ![]() si stabilitatea
initiala transversala scade;
si stabilitatea
initiala transversala scade;
pentru ![]() si stabilitatea
initiala transversala creste;
si stabilitatea
initiala transversala creste;
pentru ![]() si stabilitatea
initiala transversala ramane neschimbata.
si stabilitatea
initiala transversala ramane neschimbata.
Daca ![]() , deci nava trece intr-o apa cu greutatea specifica
mai mica, atunci:
, deci nava trece intr-o apa cu greutatea specifica
mai mica, atunci:
pentru ![]() si stabilitatea
initiala transversala creste;
si stabilitatea
initiala transversala creste;
pentru ![]() si stabilitatea
initiala transversala scade;
si stabilitatea
initiala transversala scade;
pentru ![]() si stabilitatea
initiala transversala ramane neschimbata.
si stabilitatea
initiala transversala ramane neschimbata.
La variatii mici ale
pescajului bordurile se considera verticale si ![]() si avem:
si avem:
![]() .
.
![]()
![]()
In ipoteza bordurilor verticale ![]() si daca se
tine cont de faptul ca
si daca se
tine cont de faptul ca ![]() , avem:
, avem:
![]() .
.
![]()
Variatia infinit mica ![]() a volumului carenei
determina deplasarea
a volumului carenei
determina deplasarea ![]() a centrului de
carena dupa directia axei Ox.
Ca urmare a acestei deplasari apare un moment exterior, de marime
a centrului de
carena dupa directia axei Ox.
Ca urmare a acestei deplasari apare un moment exterior, de marime ![]() , care produce inclinarea navei in plan longitudinal cu
unghiul
, care produce inclinarea navei in plan longitudinal cu
unghiul ![]() . Inclinarea determina aparitia momentului
stabilitatii
. Inclinarea determina aparitia momentului
stabilitatii ![]() .
.
La echilibru:  , adica:
, adica: ![]() .
.
Daca ![]()
![]()
In cazul inclinarilor mici finite avem:
Influenta
greutatii specifice a apei asupra asietei ![]() a navei este:
a navei este:
![]()
Se considera nava
reprezentata prin sectiunea sa in PD, avand plutirea
initiala dreapta WL si centrul de greutate situat in
punctul G. Fie q, marimea
greutatii care se deplaseaza dupa Ox din punctul ![]() in punctul
in punctul ![]() . Conform teoremei deplasarii centrul de greutate al
navei se deplaseaza din G in G' pe distanta
. Conform teoremei deplasarii centrul de greutate al
navei se deplaseaza din G in G' pe distanta ![]() definita de:
definita de:
![]() .
.
Cele doua forte
paralele, cu marimile egale si de semne contrare, dau nastere
cuplului ce defineste momentul exterior, care inclina nava in plan
longitudinal cu unghiul ![]() .
.
Marimea momentului exterior
este: ![]() .
.
Prin inclinarea navei se
deplaseaza centrul de carena inspre partea inclinarii, ceea ce
duce la aparitia momentului stabilitatii longitudinale: ![]() .
.
Se pune conditia de echilibru:
![]()
![]()
![]() .
.
Cu valoarea unghiului ![]() se poate trasa noua plutire
se poate trasa noua plutire ![]() a navei.
a navei.
Intrucat ![]() este mic si apar
dificultati la masurarea lui, mai usor se poate trasa
plutirea
este mic si apar
dificultati la masurarea lui, mai usor se poate trasa
plutirea ![]() daca se cunosc
pescajele la cele doua extremitati ale navei.
daca se cunosc
pescajele la cele doua extremitati ale navei.
Se considera nava
reprezentata prin sectiunea sa in ¤. Greutatea de marime q se deplaseaza dupa Oy din ![]() in punctul
in punctul ![]() .
.
![]()
![]()
Intrucat ![]() , valoarea unghiului
, valoarea unghiului ![]() este mare comparativ
cu
este mare comparativ
cu ![]() si permite
trasarea plutirii finale
si permite
trasarea plutirii finale ![]() cu destula
exactitate fara a mai fi nevoie sa se calculeze pescajele in
borduri.
cu destula
exactitate fara a mai fi nevoie sa se calculeze pescajele in
borduri.
Se considera nava
reprezentata prin sectiunile sale in PD si ¤. Greutatea de
marime q se deplaseaza
dupa Oz din ![]() in punctul
in punctul ![]() .
.
Se obtine deplasarea
centrului de greutate: ![]() .
.
Deoarece pe timpul
deplasarii greutatii volumul carenei nu variaza,
metacentrul ramane in pozitie initiala, deci ![]() ,
, ![]() . Se diferentiaza si se obtine:
. Se diferentiaza si se obtine:
![]() . Aceasta relatie este valabila pentru
deplasarea unei greutati infinit mici.
. Aceasta relatie este valabila pentru
deplasarea unei greutati infinit mici.
Pentru o greutate mica
finita avem: ![]()
![]() .
.
La deplasarea unei
greutati pe verticala in jos ![]() stabilitatea
initiala a navei creste, iar la deplasarea unei
greutati pe verticala in sus
stabilitatea
initiala a navei creste, iar la deplasarea unei
greutati pe verticala in sus ![]() stabilitatea
initiala a navei scade.
stabilitatea
initiala a navei scade.
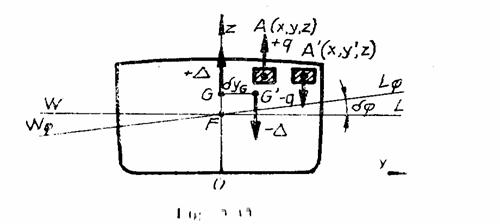
In practica exploatarii
navei pot aparea situatii care impun transportul unor
greutati suspendate. Prezenta acestora la bord
influenteaza negativ stabilitatea initiala a navei. Astfel
se considera nava reprezentata prin sectiunea sa in ¤,
raportata la sistemul de axe yOz si avand plutirea
initiala dreapta. Fie q marimea unei greutati
suspendate in punctul A prin intermediul firului de lungime ![]() . Daca greutatea nu ar fi suspendata, sub
actiunea momentului exterior de marime
. Daca greutatea nu ar fi suspendata, sub
actiunea momentului exterior de marime ![]() , nava se inclina cu unghiul
, nava se inclina cu unghiul ![]() care rezulta din
conditia de echilibru:
care rezulta din
conditia de echilibru: ![]() .
.
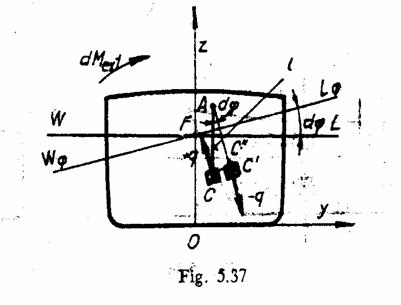
Cum greutatea este suspendata,
pe timpul inclinarii, ea se deplaseaza pe distanta ![]() astfel incat
astfel incat ![]() . Deplasarea greutatii pe timpul inclinarii
este deci insotita de modificarea punctului de aplicatie si
directiei de actiune a fortei
. Deplasarea greutatii pe timpul inclinarii
este deci insotita de modificarea punctului de aplicatie si
directiei de actiune a fortei ![]() . Acest fenomen poate fi echivalat prin reprezentarea a
doua forte, de marime q,
perpendiculare pe
. Acest fenomen poate fi echivalat prin reprezentarea a
doua forte, de marime q,
perpendiculare pe ![]() , de semne contrare si avand punctele de aplicatie
in C respectiv C'. Cuplul celor doua forte defineste un moment
de inclinare a carui marime este:
, de semne contrare si avand punctele de aplicatie
in C respectiv C'. Cuplul celor doua forte defineste un moment
de inclinare a carui marime este:
![]() .
.
Inclinarea navei cu unghiul ![]() , in prezenta greutatii suspendate, se
obtine prin actiunea unui moment exterior a carui marime
, in prezenta greutatii suspendate, se
obtine prin actiunea unui moment exterior a carui marime ![]() , adica:
, adica: ![]() .
.
Momentului exterior ![]() ii corespunde momentul
stabilitatii
ii corespunde momentul
stabilitatii ![]() . Intrucat
. Intrucat ![]() , avem:
, avem: ![]() .
.
Se pune conditia de
echilibru: ![]() .
.
![]()
![]()
Prezenta
greutatilor rostogolitoare influenteaza negativ
stabilitatea initiala. Aceasta influenta se
evidentiaza considerand sectiunea transversala a unei nave
cu bordurile duble si dublul fund curbat. Fie greutatea de marime q aflata initial in punctul C.
In urma inclinarii navei cu unghiul ![]() greutatea se
rostogoleste ajungand in punctul C'. Directiile de actiune ale
fortei
greutatea se
rostogoleste ajungand in punctul C'. Directiile de actiune ale
fortei ![]() corespunzatoare
pozitiei drepte si inclinate a navei se intersecteaza in punctul
A. Se noteaza cu
corespunzatoare
pozitiei drepte si inclinate a navei se intersecteaza in punctul
A. Se noteaza cu ![]() raza de curbura a
curbei
raza de curbura a
curbei ![]() descrise de centrul
greutatii rostogolitoare pe timpul inclinarii infinit mici.
descrise de centrul
greutatii rostogolitoare pe timpul inclinarii infinit mici.
![]() .
.
![]() .
.
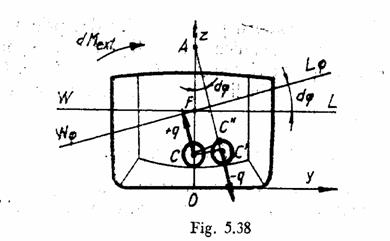
Pentru determinarea punctului A
necesar definirii lui ![]() , in cazul rostogolirii unei greutati pe o
suprafata plana, din centrul greutatii aflate in
contact cu bordul, se duce o normala la plutirea
, in cazul rostogolirii unei greutati pe o
suprafata plana, din centrul greutatii aflate in
contact cu bordul, se duce o normala la plutirea ![]() . Punctul A rezulta din intersectia acestei normale
cu normala dusa din C la WL.
. Punctul A rezulta din intersectia acestei normale
cu normala dusa din C la WL.
Se considera o nava
reprezentata prin sectiunea sa in ¤, avand plutirea
initiala dreapta WL. Fie v,
volumul lichidului de greutate specifica ![]() dintr-un tanc neumplut
complet. Corespunzator plutirii initiale a navei, suprafata
libera este paralela cu WL, iar forta de greutate a lichidului
are marimea
dintr-un tanc neumplut
complet. Corespunzator plutirii initiale a navei, suprafata
libera este paralela cu WL, iar forta de greutate a lichidului
are marimea ![]() , punctul de aplicatie in centrul geometric c al volumului v, directia si sensul contrar axei Oz.
, punctul de aplicatie in centrul geometric c al volumului v, directia si sensul contrar axei Oz.
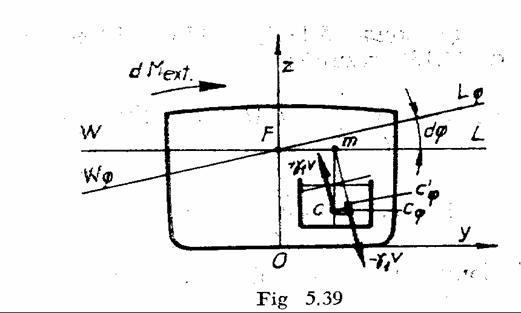
In lipsa suprafetei libere,
sub actiunea momentului exterior, de marime ![]() , nava se inclina cu unghiul
, nava se inclina cu unghiul ![]() care rezulta din
conditia de echilibru.
care rezulta din
conditia de echilibru.
In urma inclinarii,
daca lichidul are suprafata libera, aceasta isi
modifica pozitia devenind paralela cu ![]() . Punctul de aplicatie al fortei de greutate se
deplaseaza din c in
. Punctul de aplicatie al fortei de greutate se
deplaseaza din c in ![]() .
.
![]() ,
,
unde ![]() are semnificatia
de raza metacentrica transversala pentru volumul lichidului din
tanc si este:
are semnificatia
de raza metacentrica transversala pentru volumul lichidului din
tanc si este: ![]() , in care
, in care ![]() este momentul de
inertie al suprafetei libere a lichidului din tanc fata de
axa centrala longitudinala de inertie proprie.
este momentul de
inertie al suprafetei libere a lichidului din tanc fata de
axa centrala longitudinala de inertie proprie.
Astfel ca: ![]() .
.
Inclinarea navei cu unghiul ![]() , in prezenta suprafetei libere, se obtine
prin actiunea unui moment exterior a carui marime
, in prezenta suprafetei libere, se obtine
prin actiunea unui moment exterior a carui marime ![]() , adica:
, adica:
![]() .
.
Momentului exterior definit mai
sus ii corespunde momentul stabilitatii ![]() . Se pune conditia de echilibru:
. Se pune conditia de echilibru:
![]() .
.
![]() .
.
![]() ,
,
unde ![]() este momentul de
inertie al suprafetei libere fata de axa centrala
transversala de inertie proprie, iar
este momentul de
inertie al suprafetei libere fata de axa centrala
transversala de inertie proprie, iar ![]() este greutatea
specifica a apei in care se afla nava.
este greutatea
specifica a apei in care se afla nava.
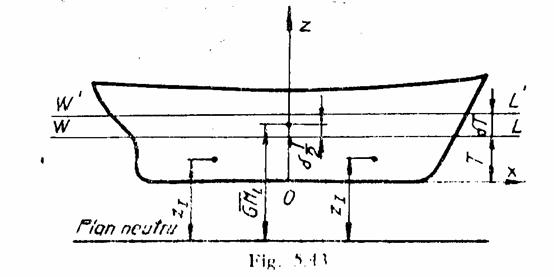
Se considera nava
reprezentata prin sectiunile sale in PD si ¤, avand plutirea
initiala dreapta WL, definita de pescajul T. Fie q, marimea greutatii
si ![]() , punctul de pe nava in care aceasta urmeaza
sa fie ambarcata.
, punctul de pe nava in care aceasta urmeaza
sa fie ambarcata.
In aceasta prima
etapa se ambarca greutatea in punctul ![]() . Dupa ambarcare se produce o variatie
. Dupa ambarcare se produce o variatie ![]() a pescajului mediu,
iar plutirea navei devine W'L'.
a pescajului mediu,
iar plutirea navei devine W'L'.
![]() ,
,
in care: ![]() sunt variatiile
razei metacentrice transversale, cotei centrului de carena si cotei
centrului de greutate.
sunt variatiile
razei metacentrice transversale, cotei centrului de carena si cotei
centrului de greutate.
![]() ,
,
unde: 
Se obtine: ![]() .
.
![]() ,
,
![]() .
.
Planul orizontal, a carui
pozitie este definita de cota  , se numeste plan neutru sau plan limita pentru
stabilitatea transversala.
, se numeste plan neutru sau plan limita pentru
stabilitatea transversala.
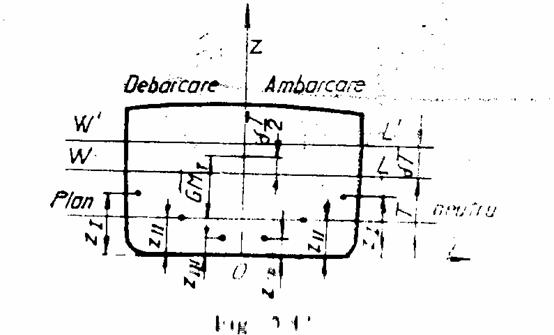
daca punctul de ambarcare
are cota ![]()
![]() ;
; ![]() , deci stabilitatea scade;
, deci stabilitatea scade;
daca punctul de ambarcare
are cota ![]()
![]() ;
; ![]() , deci stabilitatea ramane neschimbata;
, deci stabilitatea ramane neschimbata;
daca punctul de ambarcare
are cota ![]()
![]() ;
; ![]() , deci stabilitatea creste.
, deci stabilitatea creste.
daca punctul de debarcare
are cota ![]()
![]() ;
; ![]() , deci stabilitatea creste;
, deci stabilitatea creste;
daca punctul de debarcare
are cota ![]()
![]() ;
; ![]() , deci stabilitatea ramane neschimbata;
, deci stabilitatea ramane neschimbata;
daca punctul de debarcare
are cota ![]()
![]() ;
; ![]() , deci stabilitatea scade.
, deci stabilitatea scade.
![]() ;
;
![]() .
.
Planul orizontal, a carui
pozitie este definita de cota ![]() , se numeste plan neutru sau plan limita pentru
stabilitatea longitudinala.
, se numeste plan neutru sau plan limita pentru
stabilitatea longitudinala.
Deoarece ![]() , planul neutru pentru stabilitatea longitudinala este
situat mult sub nava.
, planul neutru pentru stabilitatea longitudinala este
situat mult sub nava.
La ambarcare, lui q i se asociaza semnul +, deci
termenul din fata parantezei este pozitiv si cand punctul de
ambarcare are cota ![]() si
si ![]() , deci stabilitatea scade.
, deci stabilitatea scade.
La debarcare, lui q i se asociaza semnul -, deci
termenul din fata parantezei este negativ si cand punctul de
debarcare are cota ![]() si
si ![]() , deci stabilitatea creste.
, deci stabilitatea creste.
In aceasta etapa
greutatea se deplaseaza dupa axa Ox
din ![]() in
in ![]() . Nava se inclina in plan longitudinal cu unghiul
. Nava se inclina in plan longitudinal cu unghiul ![]() .
.
Cunoscand acest unghi se
traseaza plutirea ![]() care se
intersecteaza cu W'L' in F'.
care se
intersecteaza cu W'L' in F'.
In aceasta etapa
greutatea se deplaseaza dupa Oy
din ![]() in
in ![]() . Nava se inclina in plan transversal cu unghiul
. Nava se inclina in plan transversal cu unghiul ![]() .
.
Acum se poate trasa plutirea ![]() inclinata in plan
transversal, care se raporteaza la
inclinata in plan
transversal, care se raporteaza la ![]() .
.
![]() [m]
[m]
![]() [m]
[m]
![]() [m]
[m]
Fie yOz, sistemul de axe de
coordonate corespunzator sectiunii transversale care include centrul
de carena. Pentru plutirea initiala dreapta sunt calculate:
centrul de carena ![]() si metacentrul
transversal
si metacentrul
transversal ![]() . Sub actiunea momentului exterior de marime
. Sub actiunea momentului exterior de marime ![]() , centrul de carena se deplaseaza in punctul
, centrul de carena se deplaseaza in punctul ![]() , iar metacentrul
transversal in
, iar metacentrul
transversal in ![]() .
.
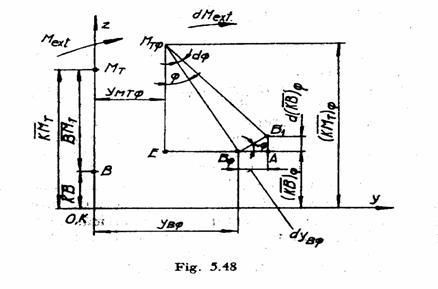
In continuare se vor determina
coordonatele acestor doua puncte. Pentru aceasta, se presupune ca sub
actiunea unui moment exterior de marime ![]() , nava se inclina suplimentar cu unghiul infinit mic
, nava se inclina suplimentar cu unghiul infinit mic ![]() . In urma inclinarii suplimentare centrul de carena
se deplaseaza din
. In urma inclinarii suplimentare centrul de carena
se deplaseaza din ![]() in
in ![]() , iar metacentrul ramane in
, iar metacentrul ramane in ![]() . Deplasarea
. Deplasarea ![]() a centrului de
carena rezulta din deplasarile elementare:
a centrului de
carena rezulta din deplasarile elementare: ![]() . Din triunghiul dreptunghic
. Din triunghiul dreptunghic ![]() se scrie:
se scrie:
![]() .
.
Din triunghiul dreptunghic ![]() avem:
avem:
![]() ;
;
![]() .
.
Integrand pe intervalul ![]() se obtine:
se obtine: 
![]() ;
;
![]() .
.
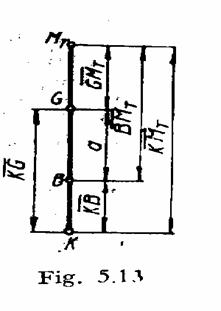
Bratul
stabilitatii statice pentru unghiul ![]() de inclinare se noteaza
cu
de inclinare se noteaza
cu ![]() si este
distanta dintre suportul fortei de deplasament si suportul
fortei de impingere Arhimede.
si este
distanta dintre suportul fortei de deplasament si suportul
fortei de impingere Arhimede.
Se
considera sistemul de axe de coordonate yOz, corespunzator
sectiunii transversale care include centrul de carena. Pentru
plutirea initiala dreapta se scrie: ![]() ;
; ![]() si
si ![]() . In urma inclinarii navei cu unghiul
. In urma inclinarii navei cu unghiul ![]() , centrul de carena si metacentrul transversal se
deplaseaza in
, centrul de carena si metacentrul transversal se
deplaseaza in ![]() si respectiv
si respectiv ![]() . Daca din G se duce
. Daca din G se duce ![]() , atunci bratul stabilitatii statice pentru
unghiul
, atunci bratul stabilitatii statice pentru
unghiul ![]() este
este ![]() . In scopul stabilirii formulei de calcul, se face
urmatoarea constructie grafica:
. In scopul stabilirii formulei de calcul, se face
urmatoarea constructie grafica:
din B se duce ![]() si
si ![]() ;
;
din ![]() se duce
se duce ![]() , deci
, deci ![]() ;
;
din I se duce ![]() ;
;
din ![]() se duce
se duce ![]() ;
;
din G se duce ![]() .
.
Astfel avem: ![]() .
.
Din triunghiurile dreptunghice
BPI, ![]() , GBL, avem:
, GBL, avem:
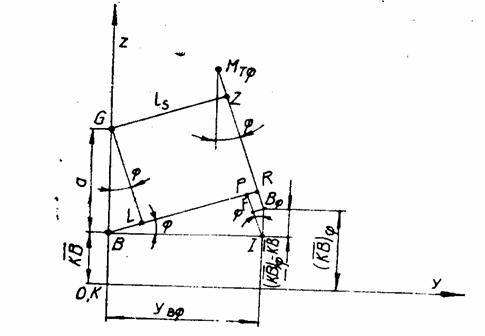

![]() .
.
centrul de carena, avand
plutirea initiala dreapta WL. Sub actiunea momentului de
marime ![]() nava se inclina
cu unghiul
nava se inclina
cu unghiul ![]() iar plutirea ei devine
iar plutirea ei devine
![]() .
.
Momentul stabilitatii
se poate scrie: ![]() .
.
![]() este momentul
stabilitatii de greutate si este:
este momentul
stabilitatii de greutate si este: ![]()
![]() este momentul
stabilitatii de forma si este:
este momentul
stabilitatii de forma si este: ![]() .
.

Astfel, bratul
stabilitatii statice este: ![]() si este totdeauna
pozitiv.
si este totdeauna
pozitiv.
Reprezentarea grafica a
functiei ![]() sau
sau ![]() pentru
pentru ![]() se numeste
diagrama stabilitatii statice.
se numeste
diagrama stabilitatii statice.
originea ![]() ;
;
maximul ![]() sau
sau ![]() ;
;
punctul de apus (declin) ![]() ;
;
un punct oarecare de pe
diagrama ![]() sau
sau ![]() .
.
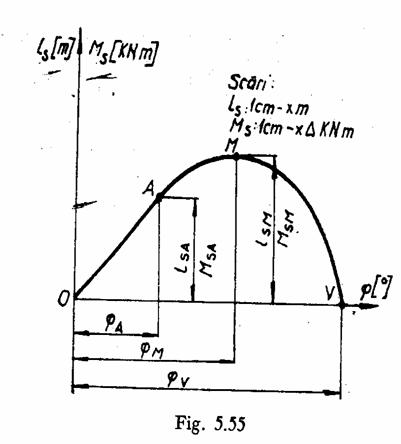
![]() este unghiul maxim de
inclinare la care nava, lasata libera, revine in pozitia
initiala de echilibru.
este unghiul maxim de
inclinare la care nava, lasata libera, revine in pozitia
initiala de echilibru.

![]() este unghiul de
inclinare care, de regula, corespunde intrarii puntii in
apa.
este unghiul de
inclinare care, de regula, corespunde intrarii puntii in
apa.
Functia ![]() sau
sau ![]() este impara,
adica:
este impara,
adica:
![]()
![]()
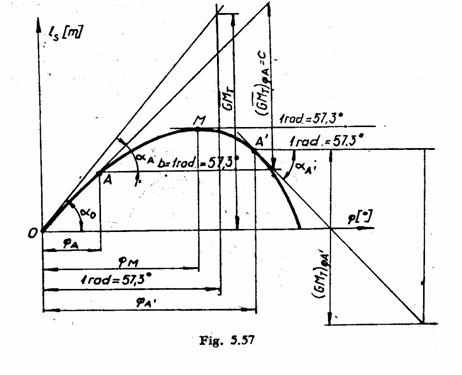
P1: Daca prin punctul ![]() se duce tangenta la
diagrama stabilitatii statice si dreapta orizontala,
atunci segmentul definit de punctele de intersectie ale verticalei situate
la
se duce tangenta la
diagrama stabilitatii statice si dreapta orizontala,
atunci segmentul definit de punctele de intersectie ale verticalei situate
la ![]() fata de A cu
cele doua, determina inaltimea metacentrica
fata de A cu
cele doua, determina inaltimea metacentrica ![]() la scara lui
la scara lui ![]() .
.
P3: Aria suprafetei
definite de graficul functiei ![]() , axa
, axa ![]() si verticala
corespunzatoare unghiului
si verticala
corespunzatoare unghiului ![]() reprezinta lucrul
mecanic al stabilitatii pentru aceasta inclinare a navei.
reprezinta lucrul
mecanic al stabilitatii pentru aceasta inclinare a navei.
Aria suprafetei definite de
graficul functiei ![]() si axa
si axa ![]() reprezinta lucrul
mecanic total al stabilitatii corespunzator inclinarii
navei intr-un bord si se numeste rezerva de stabilitate
dinamica.
reprezinta lucrul
mecanic total al stabilitatii corespunzator inclinarii
navei intr-un bord si se numeste rezerva de stabilitate
dinamica.
Bratul
stabilitatii dinamice ![]() corespunzator
unghiului
corespunzator
unghiului ![]() de inclinare
reprezinta variatia distantei dintre centrul de greutate si
centrul de carena masurat dupa directiile fortelor
aplicate in aceste puncte.
de inclinare
reprezinta variatia distantei dintre centrul de greutate si
centrul de carena masurat dupa directiile fortelor
aplicate in aceste puncte.
Lucrul mecanic exterior consumat
pentru inclinarea navei cu unghiul ![]() se noteaza cu
se noteaza cu ![]() .
.
Conditia de echilibru
dinamic este: ![]() , unde:
, unde:
![]() este lucrul mecanic al
stabilitatii.
este lucrul mecanic al
stabilitatii.
Bratul
stabilitatii dinamice este: ![]() .
.
M1: ![]()
M2: Se face constructia
grafica, dupa care se masoara pe ![]() , din punctul Z spre
, din punctul Z spre ![]() , segmentul
, segmentul ![]() si avem:
si avem:
![]() .
.
Din triunghiurile dreptunghice
BGL, BPI, ![]() avem:
avem:
Bratul
stabilitatii dinamice este: ![]() .
.
Reprezentarea grafica a
functiei ![]() sau
sau ![]() pentru
pentru ![]() se numeste
diagrama stabilitatii dinamice.
se numeste
diagrama stabilitatii dinamice.
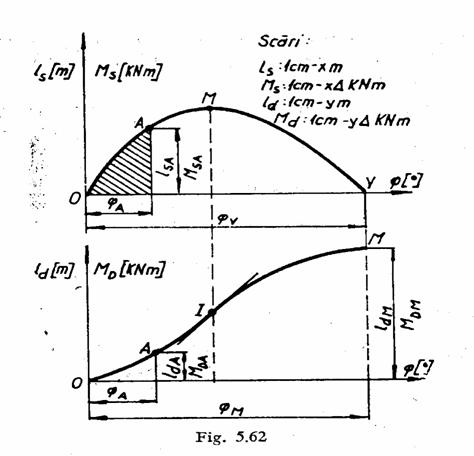
originea ![]() ;
;
punctul de inflexiune ![]() sau
sau ![]() ;
;
punctul de maxim ![]() sau
sau ![]() ;
;
un punct oarecare de pe
diagrama ![]() sau
sau ![]() .
.
P1: Graficul functiei ![]() admite axa
admite axa ![]() ca tangenta in
origine.
ca tangenta in
origine.
P2: Functia ![]() sau
sau ![]() este para,
adica:
este para,
adica: ![]() sau
sau ![]() .
.
P4: Bratul
stabilitatii dinamice ![]() corespunzator
punctului A, de abscisa
corespunzator
punctului A, de abscisa ![]() , reprezinta aria suprafetei de sub diagrama
stabilitatii statice pana la
, reprezinta aria suprafetei de sub diagrama
stabilitatii statice pana la ![]() .
.
P6: Daca prin punctul ![]() se duce tangenta la
diagrama stabilitatii dinamice si dreapta orizontala,
atunci segmentul definit de punctele de intersectie ale verticalei situate
la
se duce tangenta la
diagrama stabilitatii dinamice si dreapta orizontala,
atunci segmentul definit de punctele de intersectie ale verticalei situate
la ![]() fata de A cu
cele doua drepte determina
fata de A cu
cele doua drepte determina ![]() la scara lui
la scara lui ![]() .
.
De regula, la rezolvarea
problemelor cu ajutorul diagramelor stabilitatii, se folosesc
graficele functiilor: ![]() .
.
Inclinarea navei pana la
unghiul ![]() se produce intr-un
anumit interval de timp, deci
se produce intr-un
anumit interval de timp, deci ![]() . Din studiul echilibrului static si dinamic al navei
supuse actiunii unui moment exterior, a carui marime este
constanta in timp, rezulta ca marimea momentului exterior
ramane aceeasi la orice unghi de inclinare:
. Din studiul echilibrului static si dinamic al navei
supuse actiunii unui moment exterior, a carui marime este
constanta in timp, rezulta ca marimea momentului exterior
ramane aceeasi la orice unghi de inclinare: ![]() .
.
Conditia de echilibru
static este: ![]() .
.
Graficul functiei ![]() este reprezentat pe
diagrama stabilitatii statice. Graficul functiei
este reprezentat pe
diagrama stabilitatii statice. Graficul functiei ![]() este o dreapta
paralela cu axa
este o dreapta
paralela cu axa ![]() .
.
In punctul de intersectie a
graficului functiei ![]() pentru
pentru ![]() cu diagrama
stabilitatii statice se duce tangenta la diagrama si
orizontala. Daca unghiul format de tangenta cu orizontala este
pozitiv, atunci punctul este de echilibru stabil; daca unghiul este
negativ sau nul, atunci punctul este de echilibru instabil.
cu diagrama
stabilitatii statice se duce tangenta la diagrama si
orizontala. Daca unghiul format de tangenta cu orizontala este
pozitiv, atunci punctul este de echilibru stabil; daca unghiul este
negativ sau nul, atunci punctul este de echilibru instabil.
Echilibrul dinamic al navei
presupune respectarea conditiei: ![]() .
.
Graficul functiei ![]() este reprezentat pe
diagrama stabilitatii dinamice. Daca
este reprezentat pe
diagrama stabilitatii dinamice. Daca ![]() , atunci lucrul mecanic exterior este:
, atunci lucrul mecanic exterior este: ![]() , unde
, unde ![]() este unghiul de
inclinare in radiani.
este unghiul de
inclinare in radiani.
Din aceasta ultima
formula se observa ca graficul functiei ![]() este o dreapta ce
trece prin originea sistemului de axe.
este o dreapta ce
trece prin originea sistemului de axe.
In punctul de intersectie a
graficului functiei ![]() pentru
pentru ![]() cu diagrama
stabilitatii dinamice se duce tangenta la diagrama si
orizontala. Se noteaza cu
cu diagrama
stabilitatii dinamice se duce tangenta la diagrama si
orizontala. Se noteaza cu ![]() unghiul format de
tangenta cu orizontala si cu
unghiul format de
tangenta cu orizontala si cu ![]() unghiul format de
graficul functiei
unghiul format de
graficul functiei ![]() cu orizontala.
Daca
cu orizontala.
Daca ![]() echilibrul dinamic
este stabil; daca
echilibrul dinamic
este stabil; daca ![]() echilibrul dinamic
este instabil.
echilibrul dinamic
este instabil.
Conditia de echilibru
static: ![]() .
.
Graficul functiei ![]() este reprezentat pe
diagrama stabilitatii statice. Peste el se suprapune graficul
functiei
este reprezentat pe
diagrama stabilitatii statice. Peste el se suprapune graficul
functiei ![]() , care de data aceasta este o curba oarecare. In
punctele 1, 2, 3, 4 de intersectie ale celor doua grafice este
indeplinita conditia de echilibru static.
, care de data aceasta este o curba oarecare. In
punctele 1, 2, 3, 4 de intersectie ale celor doua grafice este
indeplinita conditia de echilibru static.
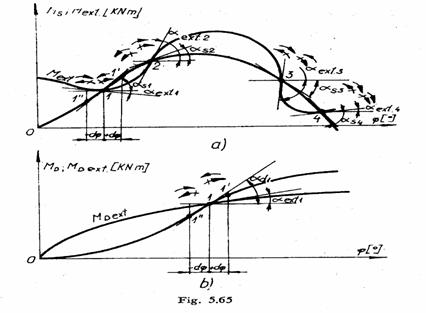
In punctul de intersectie a
graficelor functiilor ![]() ,
, ![]() , pentru
, pentru ![]() , se duc tangentele la ele, care formeaza cu orizontala
unghiurile:
, se duc tangentele la ele, care formeaza cu orizontala
unghiurile: ![]() . Daca
. Daca ![]() , punctul este de echilibru static stabil; daca
, punctul este de echilibru static stabil; daca ![]() , punctul este de echilibru static instabil.
, punctul este de echilibru static instabil.
Conditia de
echilibru dinamic: ![]() .
.
Graficul
functiei ![]() este reprezentat pe
diagrama stabilitatii dinamice. Peste el se suprapune graficul
functiei
este reprezentat pe
diagrama stabilitatii dinamice. Peste el se suprapune graficul
functiei ![]() , avand forma unei curbe oarecare. Cele doua grafice se
intersecteaza in punctul 1, unde este indeplinita conditia de
echilibru dinamic.
, avand forma unei curbe oarecare. Cele doua grafice se
intersecteaza in punctul 1, unde este indeplinita conditia de
echilibru dinamic.
In punctul de
intersectie a graficelor functiilor ![]() ,
, ![]() pentru
pentru ![]() se duc tangentele la
ele, care formeaza cu orizontala unghiurile:
se duc tangentele la
ele, care formeaza cu orizontala unghiurile: ![]() . Daca
. Daca ![]() , punctul este de echilibru dinamic stabil; daca
, punctul este de echilibru dinamic stabil; daca ![]() , punctul este de echilibru dinamic instabil.
, punctul este de echilibru dinamic instabil.
Punctul 1 este punct de echilibru dinamic stabil.
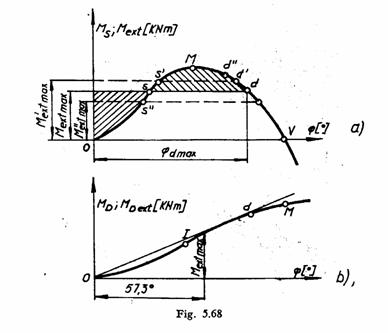
Determinarea unghiului de inclinare statica si dinamica a navei supuse actiunii unui moment exterior constant
Metoda cu diagrama stabilitatii statice
Peste graficul
functiei ![]() se traseaza la
aceeasi scara graficul functiei
se traseaza la
aceeasi scara graficul functiei ![]() care, pentru
care, pentru ![]() este o dreapta
paralela cu axa
este o dreapta
paralela cu axa ![]() .
.
La inclinarea
statica a navei, punctului ![]() de intersectie a
celor doua grafice ii corespunde unghiul
de intersectie a
celor doua grafice ii corespunde unghiul ![]() .
.
La inclinarea
dinamica, la aplicarea brusca a momentului exterior nava se
inclina pana in punctul ![]() , unde este indeplinita conditia de echilibru
dinamic
, unde este indeplinita conditia de echilibru
dinamic ![]() care se mai poate
scrie sub forma:
care se mai poate
scrie sub forma: ![]() .
.
Punctului ![]() ii corespunde unghiul
ii corespunde unghiul ![]() de inclinare dinamica a navei.
de inclinare dinamica a navei.
Inclinarea navei
pana in ![]() si revenirea spre
si revenirea spre
![]() , unde
, unde ![]() , se face cu viteza unghiulara variabila in
timp si este insotita de aparitia momentelor fortelor
de inertie. Aceste momente determina cateva miscari
oscilatorii ale navei in jurul lui
, se face cu viteza unghiulara variabila in
timp si este insotita de aparitia momentelor fortelor
de inertie. Aceste momente determina cateva miscari
oscilatorii ale navei in jurul lui ![]() , cu amplitudini din ce in ce mai mici inainte de
stabilizarea sa in acest punct.
, cu amplitudini din ce in ce mai mici inainte de
stabilizarea sa in acest punct.
La inclinarea
dinamica initiala definita de unghiul ![]() , nava poate sa-si piarda stabilitatea; in
acest caz ea nu mai revine in
, nava poate sa-si piarda stabilitatea; in
acest caz ea nu mai revine in ![]() .
.
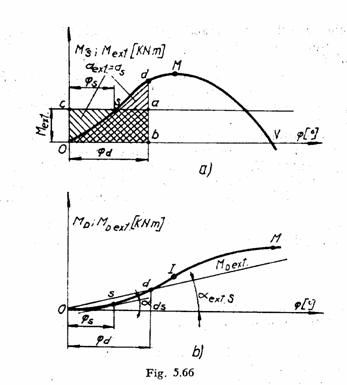
Metoda cu diagrama stabilitatii dinamice
Momentul
exterior constant, reprezentat pe diagrama stabilitatii statice,
determina lucrul mecanic ![]() .
.
Peste graficul
functiei ![]() se traseaza la
aceeasi scara graficul functiei
se traseaza la
aceeasi scara graficul functiei ![]() care este o
dreapta ce trece prin originea sistemului de axe de coordonate. Punctului
care este o
dreapta ce trece prin originea sistemului de axe de coordonate. Punctului ![]() , de intersectie a reprezentarii grafice a celor
doua functii, ii corespunde unghiul
, de intersectie a reprezentarii grafice a celor
doua functii, ii corespunde unghiul ![]() de inclinare
dinamica a navei.
de inclinare
dinamica a navei.
Avem:  .
.
In cazul de
fata ![]() este unghiul pe care
il face graficul functiei
este unghiul pe care
il face graficul functiei ![]() cu axa
cu axa ![]() .
.
Pentru a se
respecta relatia ![]() este necesar sa
se gaseasca punctul
este necesar sa
se gaseasca punctul ![]() , in care tangenta la
, in care tangenta la ![]() este paralela cu
este paralela cu ![]() .
.
Punctul ![]() astfel gasit
determina unghiul
astfel gasit
determina unghiul ![]() de inclinare
statica a navei.
de inclinare
statica a navei.
Determinarea unghiului de inclinare statica si dinamica a navei supuse actiunii unui moment exterior variabil
Metoda cu diagrama stabilitatii statice
Peste graficul
functiei ![]() se traseaza la
aceeasi scara graficul functiei
se traseaza la
aceeasi scara graficul functiei ![]() , care pentru
, care pentru ![]() , este o curba.
, este o curba.
Punctului ![]() , de intersectie a celor doua reprezentari
grafice ale functiilor, ii corespunde unghiul
, de intersectie a celor doua reprezentari
grafice ale functiilor, ii corespunde unghiul ![]() de inclinare
statica a navei.
de inclinare
statica a navei.
Punctul ![]() , caruia ii corespunde unghiul
, caruia ii corespunde unghiul ![]() de inclinare
dinamica, este stabilit astfel incat sa fie indeplinita
conditia
de inclinare
dinamica, este stabilit astfel incat sa fie indeplinita
conditia ![]() .
.
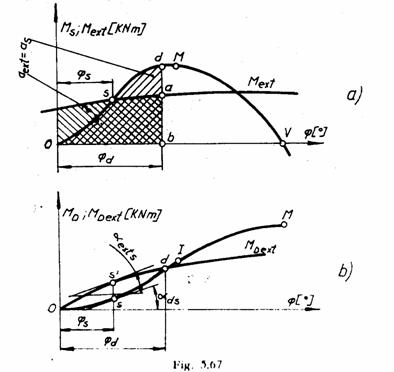
Metoda cu diagrama stabilitatii dinamice
Peste graficul functiei ![]() se traseaza la
aceeasi scara graficul functiei
se traseaza la
aceeasi scara graficul functiei ![]() care, pentru
care, pentru ![]() este o curba.
este o curba.
Punctului ![]() , de intersectie a celor doua grafice, ii
corespunde unghiul
, de intersectie a celor doua grafice, ii
corespunde unghiul ![]() de inclinare
dinamica a navei.
de inclinare
dinamica a navei.
Unghiul de inclinare
statica trebuie sa asigure respectarea conditiei ![]() .
.
Pentru determinarea unghiului de
inclinare statica se cauta punctele ![]() si
si ![]() astfel incat:
astfel incat:
segmentul ![]() ;
;
tangenta la ![]() in
in ![]() sa fie
paralela cu tangenta la
sa fie
paralela cu tangenta la ![]() in
in ![]() .
.
Segmentului ![]() ii corespunde unghiul
ii corespunde unghiul ![]() de inclinare
statica a navei.
de inclinare
statica a navei.
Se considera diagrama
stabilitatii statice. Se traseaza pe aceasta diagrama
o dreapta orizontala astfel incat sa existe relatia ![]() . Distanta de la axa
. Distanta de la axa ![]() pana la
aceasta orizontala reprezinta momentul dinamic maxim
pana la
aceasta orizontala reprezinta momentul dinamic maxim ![]() pe care il suporta
nava. Sub actiunea acestuia nava se inclina pana in punctul
pe care il suporta
nava. Sub actiunea acestuia nava se inclina pana in punctul ![]() caruia ii
corespunde unghiul
caruia ii
corespunde unghiul ![]() . Punctul
. Punctul ![]() este si de
echilibru static, deci nava ramane in acest punct.
este si de
echilibru static, deci nava ramane in acest punct.
Se duce din originea sistemului
de axe de coordonate tangenta la diagrama stabilitatii dinamice
si se obtine punctul ![]() . Aceasta dreapta reprezinta graficul
functiei
. Aceasta dreapta reprezinta graficul
functiei ![]() data de un moment
exterior constant, iar
data de un moment
exterior constant, iar ![]() este ultimul punct in
care se mai asigura conditia de echilibru dinamic.
este ultimul punct in
care se mai asigura conditia de echilibru dinamic.
![]()
Punctul ![]() in care se
stabileste nava, dupa inclinarea dinamica produsa de
in care se
stabileste nava, dupa inclinarea dinamica produsa de ![]() , se afla pe ramura descrescatoare a diagramei
stabilitatii statice si este de echilibru instabil. Momentul
dinamic admisibil
, se afla pe ramura descrescatoare a diagramei
stabilitatii statice si este de echilibru instabil. Momentul
dinamic admisibil ![]() este momentul exterior
care aplicat brusc inclina nava pana intr-un punct
este momentul exterior
care aplicat brusc inclina nava pana intr-un punct ![]() situat pe ramura
crescatoare a diagramei stabilitatii statice.
situat pe ramura
crescatoare a diagramei stabilitatii statice.
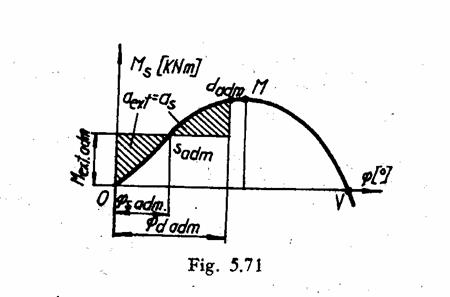
Determinarea ![]() se face astfel:
se face astfel:
prin punctul ![]() , situat pe diagrama stabilitatii statice in stanga
maximului M al acesteia, se duce o verticala;
, situat pe diagrama stabilitatii statice in stanga
maximului M al acesteia, se duce o verticala;
se traseaza apoi peste
diagrama o dreapta orizontala astfel incat ![]() ; distanta de la axa
; distanta de la axa ![]() la aceasta
orizontala reprezinta
la aceasta
orizontala reprezinta ![]() la scara diagramei.
la scara diagramei.
Momentului dinamic admisibil ii
corespund punctele ![]() ,
, ![]() respectiv unghiurile
respectiv unghiurile ![]() de inclinare
statica si dinamica.
de inclinare
statica si dinamica.
![]() se utilizeaza la
verificarea stabilitatii navei sub actiunea dinamica a
momentelor exterioare.
se utilizeaza la
verificarea stabilitatii navei sub actiunea dinamica a
momentelor exterioare.