|
|
|
|
Sunt cele mai raspandite la actionarea masinilor de lucru, deoarece asigura o caracteristica de actionare rigida si ofera posibilitati largi de reglare a turatiei.
|
|
In regim de motor, tensiunea electromotoare este opusa sensului curentului in indus, astfel ca aplicand legea a doua a lui Kirchhoff la circuitul acest circuit (conform cu figura), rezulta:
![]()
Dar, ![]() , iar
, iar ![]() , de unde
, de unde ![]() , astfel incat:
, astfel incat:
![]() ,
,
in care:
U - tensiunea de alimentare
Rr - rezistenta circuitului rotoric
- fluxul de excitatie
M - momentul motor
Ke, Km - constante,
|
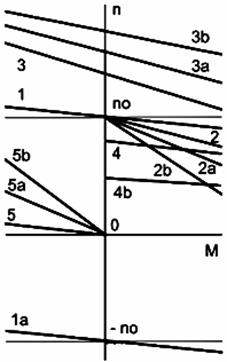
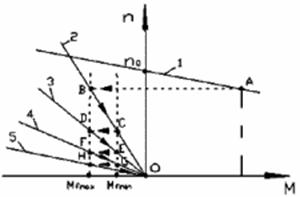
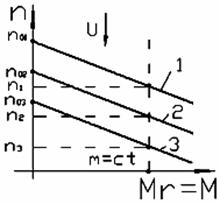
Caracteristicile mecanice ale motorului de c.c. |
deci ecuatia unei drepte cu panta inversa si ordonata la origine (pt. M=0):
![]() , (numita
turatie de mers in gol).
, (numita
turatie de mers in gol).
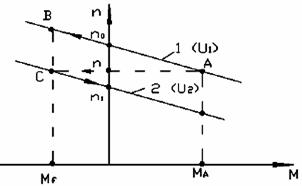
Putem deci scrie: ![]() , relatie care reprezinta caracteristica
naturala a motorului, curba 1.
, relatie care reprezinta caracteristica
naturala a motorului, curba 1.
Deoarece rezistenta infasurarii indusului este foarte mica rezulta o inclinatie b a curbei si deci o caracteristica naturala rigida. Ea se prelungeste in cadranul al doilea cu o caracteristica de tip generator recuperativ, care se obtine pentru n > n0
Pentru (-n0) se obtine similar caracteristica naturala -1, corespunzatoare rotatiei motorului in sens invers.
Caracteristicile artificiale 2 (2a, 2b) se obtin prin introducerea de rezistente aditionale Ra in circuitul rotoric. Cu cat Ra este mai mare cu atat si panta b creste, si deci se obtine un fascicol de drepte care trec prin originea coordonatelor avand panta crescatoare (caracteristici artificiale rotorice).
Caracteristicile 3 (3a, 3b) se obtin prin reducerea fluxului de excitatie (deci a curentului de excitatie Ie), si prin aceasta se modifica atat ordonata la origine cat si coeficientul unghiular b ( scade, iar no si b cresc), (caracteristici artificiale de flux).
Caracteristicile artificiale 4 (4b) se obtin prin modificarea tensiunii de alimentare U a indusului la motorul cu excitatie separata, (caracteristici artificiale de tensiune).
Daca Ur = 0 T n0 = 0 si se obtine caracteristica 5 care trece prin origine si are panta dependenta de rezistenta circuitului indusului (5a, 5b) - caracteristica masinii in regim de generator.
La punerea motorului sub tensiune deoarece E = ke x x n si n = 0, rezulta
E = 0 deci relatia tensiunilor devine:
![]()
Deoarece Rr este mica, la pornire apar curenti de
pornire Irp mult mai mari decat curentul nominal: ![]() .
.
|
Variatia curentilor de pornire |
Variatia curentilor de pornire se poate analiza din reprezentarea alaturata.
Daca rotorul este blocat, se obtine curentul de pornire maxim maximorum IMM.
La o pornire normala curentul rotoric atinge valoarea maxima IRpmax, iar apoi, pe masura ce turatia n creste, curentul scade la valoarea nominala IRn
De obicei ![]() , ceea ce constituie o suprasolicitare atat a motorului cat
si a instalatiei electrice. De aceea pornirea directa este
permisa numai la motoare de putere redusa (P < 1Kw), la porniri
rare. La puteri mari se impune limitarea Irpmax IRn, deci este necesara pornirea
indirecta.
, ceea ce constituie o suprasolicitare atat a motorului cat
si a instalatiei electrice. De aceea pornirea directa este
permisa numai la motoare de putere redusa (P < 1Kw), la porniri
rare. La puteri mari se impune limitarea Irpmax IRn, deci este necesara pornirea
indirecta.
Curentul de pornire trebuie limitat la intervalul IRpmin < IRp < IRpmax.
Curentul rotoric IRp se stabilizeaza la valoarea nominala Irn dupa depasirea timpului de accelerare (pornire) ta.
|
|
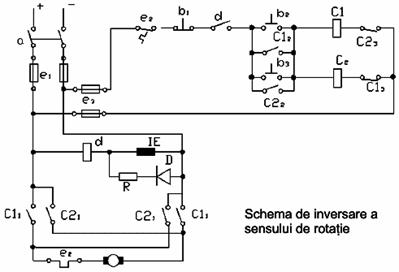
2. a Schema de pornire directa cu inversarea sensului de rotatie
In figura s-au notat:
e1 sigurante fuzibile principale (de forta)
e2 releu termic
e3 sigurante pentru
circuitul de comanda
d releu de curent
nominal, necesar ca in
cazul intreruperii
accidentale a circuitu-
lui de excitatie motorul
sa nu se ambaleze
datorita fluxului
remanent (![]() )
)
D dioda de protectie a IE impotriva tensiunii electromotoare de autoinductie care apare la intreruperea alimentarii circuitului de excitatie
b1 - buton de oprire
b2 - buton de pornire sens dreapta
b3 - buton de pornire sens stanga
C1 - contactor de functionare rotire dreapta
C2 - contactor de functionare rotire stanga.
Rotirea in cele doua sensuri se realizeaza prin perechile de contacte C11 si C12 care asigura inversarea polaritatii tensiunii de alimentare a rotorului.
2. b Pornirea indirecta cu rezistenta in circuit rotoric (fig. 53):
|
Pornirea indirecta cu rezistenta in circuitul indusului |
Se realizeaza prin introducerea in serie cu rotorul a unui reostat de pornire Rp sau a unui grup de 2 - 5 rezistoare fixe dimensionate in asa fel incat:
![]() ,
,
|
Caracteristicile mecanice si diagramele de curent la pornirea in 3 trepte |
![]() Pornirea se face cu toate rezistoarele
inseriate cu rotorul, iar pe masura ce turatia n se
accelereaza si curentul scade, se scurtcircuiteaza cate o
rezistenta pana la eliminarea totala a lor.
Pornirea se face cu toate rezistoarele
inseriate cu rotorul, iar pe masura ce turatia n se
accelereaza si curentul scade, se scurtcircuiteaza cate o
rezistenta pana la eliminarea totala a lor.
Se recomanda ca:
![]()
![]()
Corespunzator curentilor vom avea:
![]() , deoarece
, deoarece ![]()
![]()
![]()
Diagramele de functionare pentru pornirea se in 3 trepte conform cu caracteristicile artificiale: AB - CD - EF - GN.
Pornirea se face pe caracteristica 1 din punctul A pana in punctul B, cand se atinge turatia n1 pentru care putem scrie :
![]()
Prin scurtcircuitarea lui Rp3 se trece din B in C pe caracteristica 2.Motorul functioneaza pe caracteristica 2 pana la atingerea turatiei n2 pentru care avem:
![]()
Prin scurtcircuitarea lui Rp2 se trece din D in E pe caracteristica 3. Motorul functioneaza pe caracteristica 3 pana la atingerea turatiei n3 pentru care putem scrie:
![]()
Prin scurtcircuitarea lui Rp1se trece din F in G si continua functionarea pe caracteristica naturala 4 pana in punctul nominal de functionare N .
Observatii:
- metoda este ne economica din punct de vedere energetic, desi este foarte
utilizata ;
- pentru numar mic de trepte de pornire avem socuri mari de curent, dar reostatul
este mai simplu. Pentru numar mare de trepte rezulta socuri mici, dar reostat
scump;
- reostatul sau rezistoarele se dimensioneaza ca putere pentru o functionare de
scurta durata.
Pentru respectarea parametrilor de pornire se recomanda ca aceasta sa se realizeze automat, rezistoarele Rp, fiind scurtcircuitate prin contactele unor contactoare comandate in urmatoarele moduri:
- in functie de turatia n, prin detectarea tensiunii electromotoare cu ajutorul unor
relee de tensiune, bazat pe relatia: E = ke x x n
- in functie de curentul rotoric (Ir) - folosind relee de curent;
- in functie de timp - folosind relee de temporizare.
Primele doua metode prezinta avantajul ca parametrii de pornire sunt realizati la orice regim de lucru (sarcina).
2. c. Pornirea prin reglarea tensiunii de alimentare U
Este folosita mai ales atunci cand este
necesara si reglarea n si consta in variatia
continua sau in trepte a tensiunii la perii 0 < U < Un
fluxul de excitatie ramanand constant: ![]()
Reglarea continua a tensiunii U se poate realiza:
- cu convertizor rotativ - se aplica numai cand este necesara si reglarea turatiei n
in limite foarte largi
- cu convertizor static, care poate fi:
- cu amplificator magnetic
- cu redresor comandat
- cu variatoare electronice de tensiune continua
Reglarea in trepte a tensiunii U se realizeaza:
- cu transformator cu prize in secundar
- cu instalatii de redresare.
Asa cum s-a mai aratat, pentru motoarele de curent continuu, sunt valabile urmatoarele relatii:
![]() sau
sau ![]()
in care:
![]() reprezinta
ordonata la origine care este functie de tensiunea U de alimentare, astfel
ca la modul general putem scrie:
reprezinta
ordonata la origine care este functie de tensiunea U de alimentare, astfel
ca la modul general putem scrie: ![]()
Deoarece la pornire se
impune: ![]() , si corespunzator
, si corespunzator ![]() , cu
, cu ![]() , rezulta
, rezulta ![]()
Reglarea se face pe caracteristici artificiale, dupa cum urmeaza (vezi figura):
|
Diagramele de tensiune si caracteristicile artificiale |
AB - functioneaza pe caracteristica 1 pana in B, pentru care putem scrie:
![]() ,
,
iar apoi se comuta pe caracteristica 2 (se sare in C) pentru care avem:
![]()
CD - functioneaza pe caracteristica 2 pana in D, pentru care putem scrie:
![]() ,
,
iar apoi se comuta pe caracteristica 3 (se sare in E) pentru care avem:
![]()
EF - functioneaza pe caracteristica 3 pana in F, pentru care putem scrie:
![]() ,
,
cand se comuta pe caracteristica 4 (se sare in G) pentru care avem:
![]()
functionarea motorului continuand pe caracteristica naturala.
3. Franarea motorului de curent continuu
In regim de franare motorul primeste putere mecanica de la arbore si putere electrica de la retea si le transforma ireversibil in caldura, dezvoltand totodata un cuplu de franare.
Franarea electrica se foloseste in urmatoarele scopuri:
- mentinerea constanta a vitezei atunci cand apar cupluri datorate unor forte
potentiale (de inertie, gravitatie) sau variaza momentul rezistent Mr.
- reducerea vitezei unghiulare impusa de procesul tehnologic sau in scopul opririi.
- mentinerea in repaus a organului de lucru atunci cand apar cupluri
destabilizatoare.
Avantajele franarii electrice:
- lipsa uzurii mecanice
- gabarit redus (lipsesc franele mecanice)
- dezvoltarea unor cupluri de franare cu valori controlabile
- posibilitatea recuperarii partiale a energiei (transformarea energiei cinetice in energie electrica)
Metode de franare electrice:
- dinamica (in regim de generator fara recuperarea energiei)
- recuperativa (in regim de generator cu recuperarea energiei)
- prin inversarea sensului de rotatie (propriu-zisa)
3. a. Franarea dinamica a motorului c.c.
Consta in decuplarea alimentarii rotorului si cuplarea
lui pe o rezistenta de franare ![]() . Excitatia fiind cuplata, motorul trece in regim
de generator nerecuperativ, energia electrica produsa fiind
consumata (transformata in caldura) pe rezistenta de
franare. Deoarece
. Excitatia fiind cuplata, motorul trece in regim
de generator nerecuperativ, energia electrica produsa fiind
consumata (transformata in caldura) pe rezistenta de
franare. Deoarece
U = 0, rezulta:
![]() , de unde:
, de unde: ![]() ,
,
deci, o
dreapta ce trece prin origine cu coeficientul unghiular negativ.
(caracteristicile 2, 3, 4,). Se observa ca, cu cat ![]() este mai mica, cu
atat momentul de franare este mai mare, fiind maxim pentru
este mai mica, cu
atat momentul de franare este mai mare, fiind maxim pentru ![]() (rotor in scurt circuit, caracteristica naturala ca generator
5). Punerea in scurt nu se utilizeaza datorita socului termic
si mecanic la care este supus motorul.
(rotor in scurt circuit, caracteristica naturala ca generator
5). Punerea in scurt nu se utilizeaza datorita socului termic
si mecanic la care este supus motorul.
|
Franarea dinamica |
|
Pornire - franare cu o singura treapta intermediara |
Franarea dinamica este brusca, dar Mf scade odata cu scaderea lui n, de aceea, pentru o oprire mai rapida se poate face franarea in trepte (caracteristicile 2, 3, 4, 5), in cadrul unor comutari automate.
3. b. Pornire - franare cu o singura treapta intermediara
d1 - releu de curent nominal
d2 - releu de tensiune pentru pornire
d1 - releu de tensiune pentru franare
Rp, Rf - rezistenta de pornire (franare)
C1, C2 - contactor de pornire (franare)
Pornirea se realizeaza prin apasarea butonului ![]() , prin aceasta fiind alimentata bobina C1. Ca
urmare se deschide contactulC13, iar apoi prin inchiderea
contactului C11 se realizeaza pornirea motorului cu rezistenta
, prin aceasta fiind alimentata bobina C1. Ca
urmare se deschide contactulC13, iar apoi prin inchiderea
contactului C11 se realizeaza pornirea motorului cu rezistenta ![]() inseriata cu rotorul. Prin crestetea turatiei are loc
variatia tensiunii la bornele rotorului care este detectata de releul de
tensiune d2, care la valoarea programata a tensiunii isi inchide contactul
d2,suntand rezistenta de pornire Rp (se sare din
punctul B in punctul C). In continuare motorul functioneaza pe
caracteristica naturala 2.
inseriata cu rotorul. Prin crestetea turatiei are loc
variatia tensiunii la bornele rotorului care este detectata de releul de
tensiune d2, care la valoarea programata a tensiunii isi inchide contactul
d2,suntand rezistenta de pornire Rp (se sare din
punctul B in punctul C). In continuare motorul functioneaza pe
caracteristica naturala 2.
La oprire, prin apasarea
butonului b2 se intrerupe alimentarea bobinei C1, astfel incat, prin
deschiderea contactului C1 se intrerupe alimentarea rotorului (salt din punctul
D in E), iar prin inchiderea contactului C13 se cupleaza releul
de tensiune ![]() care isi inchide
contactul
care isi inchide
contactul ![]() . Prin alimentarea bobinei contactorului C2, acesta isi
inchide contactul C2, legand rezistenta de franare Rf in paralel pe
circuitul rotoric. Energia electrica produsa de masina
electrica, care trece in regim de generator (caracteristica 3), este
transformata in caldura pe rezistenta Rr + Rf
pana la anularea turatiei. Diagramele de functionare, caracteristici
mecanice si curent sunt redate mai jos.
. Prin alimentarea bobinei contactorului C2, acesta isi
inchide contactul C2, legand rezistenta de franare Rf in paralel pe
circuitul rotoric. Energia electrica produsa de masina
electrica, care trece in regim de generator (caracteristica 3), este
transformata in caldura pe rezistenta Rr + Rf
pana la anularea turatiei. Diagramele de functionare, caracteristici
mecanice si curent sunt redate mai jos.
|
Diagramele de functionare |
Franarea are loc din E pana in F, cand releul d3, prin deschiderea contactului propriu intrerupe alimen-tarea bobinei C2, care decupleaza rezistorul Rf, in continuare oprirea fiind inertiala.
Mfmin depinde de tensiunea de declansare a releului d3.
Intensitatea franarii poate fi reglata prin alegerea corespunzatoare a valorii Rf sau prin utilizarea unui reostat de franare.
|
Caracteristicile de functionare in regim recuperativ |
Are loc in cazul in care motorul conectat la retea este obligat de mecanismul antrenat sa se roteasca cu o turatie mai mare decat cea de functionare: n > n0.
Deoarece ![]() si
si ![]()
![]()
![]() , deci din relatia:
, deci din relatia:
![]() T Ir < 0 T
T Ir < 0 T ![]() si motorul trece
in regim de generator consumand energie mecanica (dezvoltand astfel un
cuplu de franare), energia electrica produsa fiind furnizata
retelei.
si motorul trece
in regim de generator consumand energie mecanica (dezvoltand astfel un
cuplu de franare), energia electrica produsa fiind furnizata
retelei.
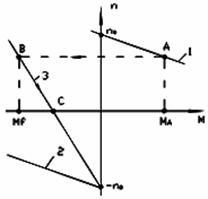
La nivelul caracteristicilor de functionare lucrurile se petrec astfel punctul de functionare se muta din A in B, pentru care se dezvolta momentul de franare Mf.
Acelasi efect de franare recuperativa se obtine si daca se reduce tensiunea de alimentare (se trece pe caracteristica 2).
Pentru U2 < U1 rezulta n1 < n0, deci se trece de pe caracteristica 1 pe caracteristica 2 (din A in C) pentru care, la turatia n, apare un Mf < 0, ce tinde spre 0 pe masura ce n n1.
Consta in schimbarea sensului de circulatie a curentului prin indus, realizata prin schimbarea polaritatii tensiunii la bornele indusului cu pastrarea sensului de rotatie;
Prin inversarea polaritatii:
![]() ,
, ![]() ,
, ![]()
Initial: ![]()
La franare: ![]()
|
|
Grafic, lucrurile se prezinta ca in figura.
A - punct de functionare (caracteristica 1)
La inversarea polaritatii n0 - n0, si A B,
pentru care, M Mf; apare franarea din B C, cand va fi necesara intreruperea
alimentarii.
Franarea nu este totala, iar oprirea in C este dificila. Se lucreaza pe caracteristica artificiala 3 si nu pe cea naturala 2 pentru care apar solicitari electrice si mecanice inadmisibile.
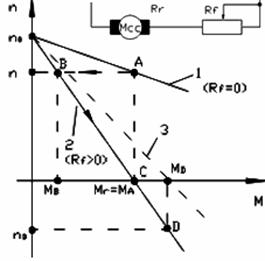
3. d. Franarea prin marirea rezistentei
circuitului indusului
|
|
In acest caz se introduce un reostat de franare inseriat indusului. Marind rezistenta Rf se schimba caracteristica de functionare si totodata si momentul motor M (se trece de pe caracteristica 1 pe caracteristica 2), turatia scade din punctul B pana in punctul C pentru care avem turatie nula (s-a realizat oprirea) si Mr = Ma,
5. Reglarea turatiei motorului de curent continuu
|
Reglarea turatiei prin utilizarea a doua reostate |
Motoarele de curent continuu sunt mai avantajoase in raport cu motoarele de curent alternativ in ceea ce priveste reglarea vitezei, avand un domeniu de reglare mai mare si fiind mai economice.
In montajul din figura
reglarea turatiei se realizeaza prin utilizarea a doua reostate (![]() pentru reglarea curentului rotoric si
pentru reglarea curentului rotoric si![]() pentru reglarea fluxului de excitatie).
pentru reglarea fluxului de excitatie).
Reglarea se realizeaza pe baza relatiilor:
![]() , dar
, dar ![]()
![]()
![]() cu
cu ![]()
![]()
![]() , iar metodele de reglare a turatiei sunt:
, iar metodele de reglare a turatiei sunt:
1 - prin variatia tensiunii la bornele rotorului Ur, la n = ct. si = ct.,
2 - prin variatia fluxului de excitatie , la U = ct. si Ur = ct.,
3 - prin variatia tensiunii sursei de alimentare U, la = ct.
|
Reglarea turatiei motorului de curent continuu prin variatia Ur |
Se realizeaza conform montajului din figura in care avem: U = Ualim, = ct,
Rs - reostat serie, Rp - reostat derivatie (paralel)
Reglarea se bazeaza pe relatiile:
 ,
, 
De cele mai multe ori ![]() T
T ![]() T
T ![]() , dar
, dar
![]() T
T ![]() , in care, m este coeficientul unghiular al caracteristicii.
, in care, m este coeficientul unghiular al caracteristicii.
1.
![]() , - pe caracteristica naturala,
, - pe caracteristica naturala,
2.
![]() - pe caracteristica
artificiala.
- pe caracteristica
artificiala.
Observatie: teoretic 0 < n < n0 dar practic 0,35 n0 < n < n0
Dezavantaje :
- Rs - este voluminos si scump (functionare de durata),
- la Mr mici, posibilitatile de reglare scad,
- randament redus ,deci se foloseste la motoare de puteri mici.
5.2. Reglarea turatiei motorului de curent continuu prin variatia
Aceasta se poate face in doua moduri:
- cu reostat in circuitul IE, metoda aplicata la motoarele de puteri mici si mijlocii, cu excitatie in derivatie;
-
prin utilizarea unei surse de tensiune reglabila pentru alimentarea
independenta a IE ![]() ,
, ![]() T 1 < 2
T 1 < 2
|
Reglarea turatiei prin modificarea fluxului la variantele derivatie si separata |
Cum insa: ![]() T no1 > no2 si
m1 > m2
T no1 > no2 si
m1 > m2
Observatie:
- cu scaderea se obtin caracteristici artificiale tot mai elastice;
- deoarece caracteristica naturala 2 se obtine pentru Fmax T turatia poate fi reglata numai in sens crescator;
- pentru << n, fluxul de reactie a indusului poate influenta mult de excitatie si
caracteristica poate sa
devina urcatoare (functionare instabila). Reglarea se
limiteaza la domeniul :  .
.
- deoarece cu , Ir , acesta se limiteaza din considerente termice si trebuie sa ne incadram in hiperbola de putere ct.: N = n x M = ct., deci cu n , M
- randament care relativ putin cu cresterea turatiei datorita pierderilor pe Re si Rr.
|
Caracteristicile mecanice pentru reglarea prin modificarea tensiunii |
5.3. Reglarea turatiei motorului de curent
continuu prin variatia tensiunii de
alimentare.
Metoda presupune o sursa proprie de alimentare a motorului, reglabila, si se foloseste cand este necesar un domeniu larg de reglare. Sursa poate fi:
- un generator de c.c. rotativ;
- o instalatie de redresare cu tensiune reglabila.
Intrucat ![]() T no = f(U), m = ct.; se obtine astfel un domeniu larg de
reglare a turatiei la M constant.
T no = f(U), m = ct.; se obtine astfel un domeniu larg de
reglare a turatiei la M constant.
Pentru reglarea turatiei la puteri mari se utilizeaza grupul generator - motor (Ward - Leonard) a carui schema se reda mai jos si are urmatoare componenta:
|
Grupul generator - motor Ward - Leonard |
- Mca - motor de curent alternativ trifazat care antreneaza cele doua generatoare de c.c. - E si G;
- E - excitatrice pentru alimentarea IEG si IEM;
- G - generator pentru alimentarea Mcc;
Mca, G si Mcc au puteri aproximativ egale, iar E este de putere mult mai mica (ce poate fi inlocuita cu un redresor la instalatiile stationare).
Prin reglarea ReE se regleaza EE si deci tensiunea UE de excitatie a G si Mcc.
Prin reglarea ReG se regleaza EG, deci tensiunea U de alimentare a motorului Mcc. Inversarea polaritatii U, deci a sensului de rotatie a Mcc se face prin perechile de contacte C1 si C2 prin care se inverseaza EG (prin ReG se regleaza deci turatia Mcc).
Prin reglarea se regleaza eM,
deci turatia motorului ![]() . Uneori inversarea sensului
. Uneori inversarea sensului ![]() se face prin
inversarea eM (prin inversarea polaritatii UE
pentru iEM).
se face prin
inversarea eM (prin inversarea polaritatii UE
pentru iEM).
Pornirea:
se regleaza: ReG pe R maxima
ReM pe R minima T U min si eM max
se selecteaza sensul de rotatie prin contactele C1 sau C2;
se
porneste Mca si se regleaza REE pana
la obtinerea ![]() dorita;
dorita;
se
mareste turatia n prin micsorarea ![]() (a tensiunii de
alimentare a Mcc);
(a tensiunii de
alimentare a Mcc);
se
continua cresterea turatiei prin marirea ReM
(regl. ![]() ).
).
Obs.: daca EG scade T U scade si Mcc devine generator iar G motor T franarea sistemului
Oprirea (franarea):
se reduce turatia din ReM (prin micsorarea rezistentei lui);
se reduce turatia din ReG (prin marirea rezistentei lui);
cand n = 0 se comanda schimbarea C1 cu C2;
se
micsoreaza ReG si apoi se mareste ![]() , prin aceasta turatia crescand in sens invers;
, prin aceasta turatia crescand in sens invers;
Avantaje:
reglarea continua a turatiei in limite largi;
posibilitatea franarilor lente sau bruste (eventual cu recuperarea energiei);
regimuri tranzitorii scurte;
utilizarea unor reostate de mica putere T cost redus si randament ridicat;
Dezavantaje:
necesita cel putin 3 masini electrice;
puterea este de circa 3 ori mai mare ca cea necesara la ML;
randament global redus.
Utilizari:
masini-unelte mari, utilaje mari pentru prelucrari la cald;
macarale mari;
ascensoare rapide;
transport feroviar si maritim.
6. Selsinul
|
|
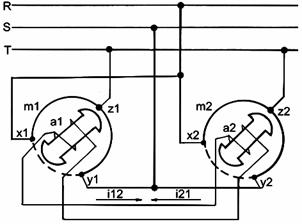
Selsinul nu este propriu zis o masina motoare, ci un asa numit traductor de pozitie; il includem la acest capitol al masinilor electrice deoarece el dezvolta cuplu motor sau de franare. El mai este numit si transformator trifazic - monofazic, ca urmare a unor fenomene similare celor care se petrec intr-un transformator.
In acest caz infasurarea primara este trifazica (trei infasurari inseriate) iar cea secundara - monofazica. Astfel, cele trei bobine din primar (m) induc trei t.e.m. in infasurarea secundara (a), a caror rezultanta va avea o marime dependenta de pozitia indusului a fata de cele trei bobine primare. Cele doua masini m1 (sa o numit emitatoare) si m2 (receptoare) sunt legate in faza iar secundarele in faza si opozitie.
Sa presupunem deci ca pozitia celor doua indusuri a1 si a2 este aceeasi. In acest caz vectorii rezultantelor tensiunilor electromotoare din a1 si a2 sunt egali si au aceeasi pozitie. In aceasta situatie cei doi curenti i12 si i21 sunt egali si in opozitie, suma lor fiind egala cu 0.
Rotind indusul a1 (emitatorul) intr-un sens oarecare t.e.m. se modifica atat ca valoare cat si ca directie. In acest caz, suma celor doi curenti nu mai este 0 si bobina a2 va fi parcursa de un curent diferenta i12 - i21, care va determina un camp magnetic. Acesta din urma, in interactiune cu campul determinat de infasurarile inductorului, va produce un cuplu mecanic ce va roti pe a2 in sensul in care a fost rotit a1, pana cand noua pozitie a sa va coincide cu a rotorului emitatorului, adica pana cand cei doi curenti i12 si i21 se vor egala (suma lor va fi din nou 0).
Functionarea aceasta se produce numai teoretic atat de exact, deoarece pe masura ce diferenta dintre cei doi curenti scade, cuplul care determina ocuparea unei pozitii similare de catre a2 fata de a1 este din ce in ce mai redus si, la un moment dat, prea mic pentru ca sa mai asigure rotirea. Pentru a creste precizia aceste sisteme se alimenteaza cu curenti de frecventa ridicata, ceea ce duce la cresterea t.e.m. de inductie si astfel a valorilor absolute ale curentilor i12 si i21.